Autonomní vozidla budou rozlišovat povahu okolních řidičů a vzorce chování
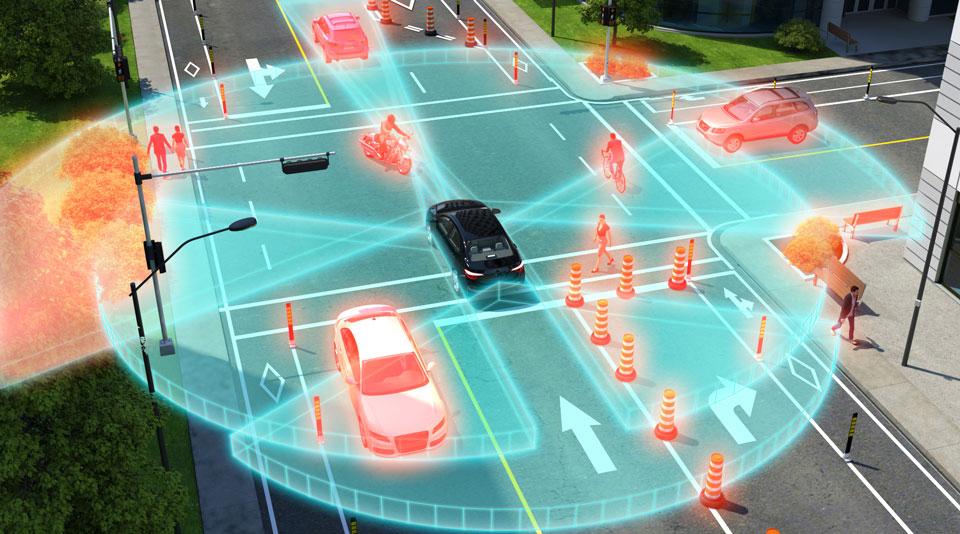
Vědci zjistili, že při využívání autonomních vozidel je nutné mimo striktně fyzikální zákony definovat i složku emocionální, resp. že je důležité, aby auto bylo schopno odhadnout chování ostatních řidičů, které může být i nestandardní.
Několikrát denně se setkáváme na pozemních komunikacích s tím, že se někteří řidiči pokouší o nebezpečný manévr, a to otočení se přes protisměr. Jen v USA je každým rokem zhruba 1,4 milionu nehod způsobených při otáčení. Problém tak nastává v otázce autonomních vozů, které se řídí striktní fyzikou a nedokáží odhadnou nepředvídatelné chování ostatních řidičů.
To přimělo skupinu vědců vytvořit algoritmus, který by zlepšil možnosti autonomních vozidel tím, že jim umožní lépe interpretovat chování jiných řidičů na pozemních komunikacích. Obecně lze konstatovat, že se odehrávají dva scénáře. Jeden, který zahrnuje řidiče, jehož chování nejsme ani my schopni předpovídat a druhý, který uvažuje o určitých náznacích znamenající konkrétní gesto. Jedná se například o situaci, kdy nás auto v rychlejším pruhu pouští před sebe – i když řidič nic neřekne, z chování jeho auta je to jasně patrné.

Autonomní vozidlo se naproti tomu chová „bezemočně“, a ostatní řidiči tak těžko mohou odhadnout, co se chystá udělat. Podle studie provedené v Kalifornii stojí za více než polovinou dopravních nehod, při kterých figurovalo i autonomní vozidlo, právě špatný odhad okolních řidičů při nevyzpytatelném chování autonomního vozidla.
Vědci z MIT, proto chtějí do autonomních vozidel zabudovat sociální hodnoty, a proto rozdělili řidiče do čtyřech základních skupin:
- Altruista – je řidič, který se snaží maximalizovat prožitek ostatních řidičů z jízdy
- Prosociální řidič - Často uhýbají a podnikají kroky, aby ostatním řidičům šli z cesty.
- Individualista – se snaží maximalizovat svůj vlastní prožitek z jízdy.
- Soutěživý řidič – který se snaží být zkrátka lepší a rychlejší než ti ostatní
Tento algoritmus tak v sobě zahrunuje předpokládaný vzorec chování i pravděpodobnou trajektorii jízdy pro každou z těchto kategorií. Vozidlo bude zkrátka pozorovat ostatní řidiče, kategorizuje si je a poté bude vypočítávat, jak se asi dále zachovají. Podle dosavadních výsledků se zjistilo, že zhruba polovina řidičů patří do kategorie prosociální, ale dalších 40% řidičů jsou zkrátka sobci. Dalším zjištěním je fakt, že každý řidič se během jízdy mění a může tak být sobec při předjíždění, pak se prosociálně zařadí, ale v okamžiku se zase zachová jako sobec.
Zdroje: